Essence
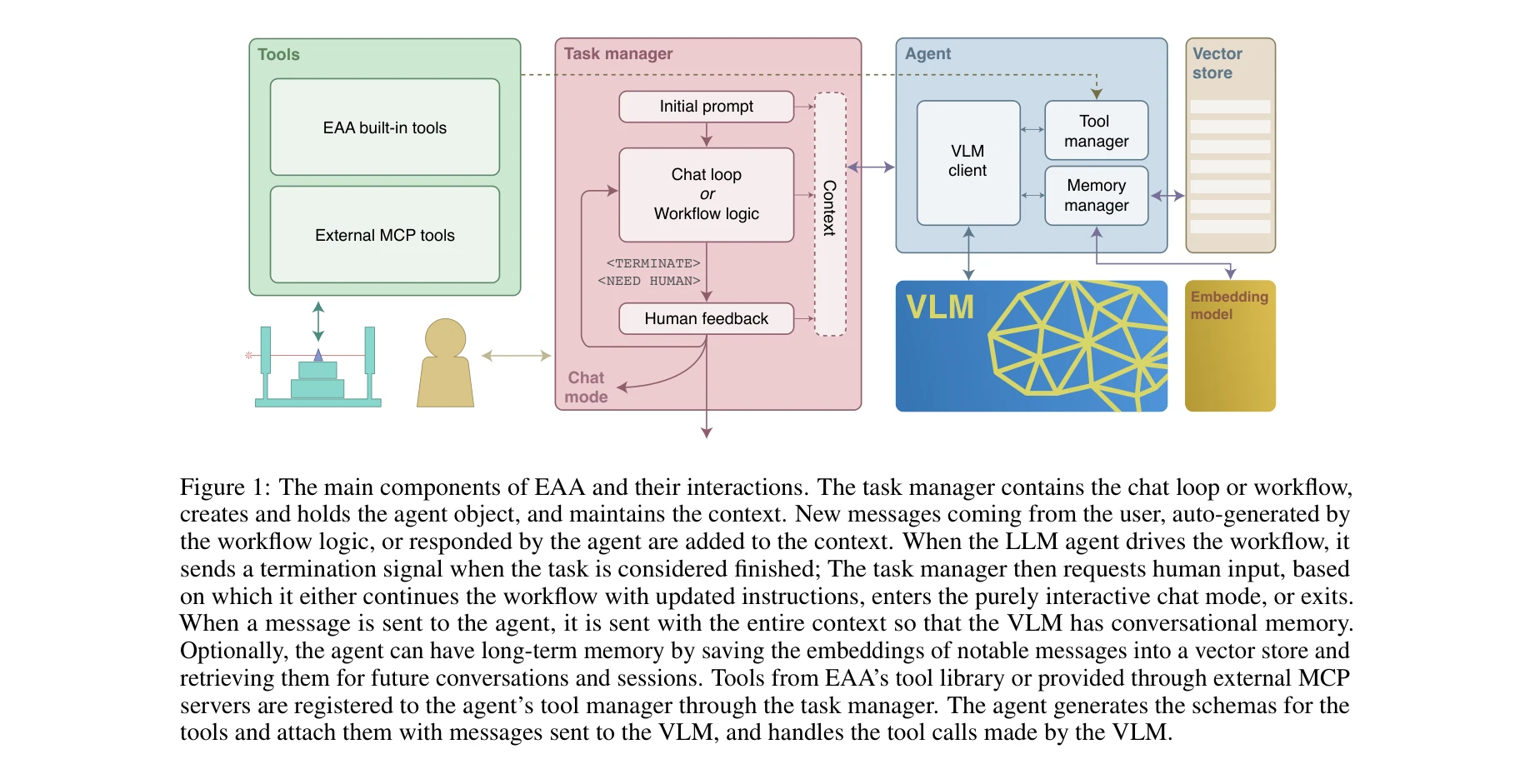
Figure 1: EAA의 주요 구성 요소 및 상호작용. 작업 관리자(Task Manager)가 채팅 루프 또는 워크플로우를 포함하며, 에이전트 객체를 생성 및 유지하고 문맥을 관리한다.
본 논문은 비전 언어 모델(Vision Language Model, VLM) 기반 에이전트 시스템인 EAA(Experiment Automation Agents)를 제시하며, 이는 복잡한 미시경 실험 워크플로우를 자동화하기 위해 멀티모달 추론, 도구 기반 행동, 장기 메모리를 통합한다. Advanced Photon Source의 이미징 빔라인에서 자동 영역판 초점 맞춤, 자연언어 기반 특성 검색, 대화형 데이터 획득을 구현하여 사용자 접근성을 대폭 개선한다.