저자: Jesse Haworth, Rishi Biswas, Justin Opfermann, Michael Kam, Yaning Wang, Desire Pantalone, Francis X. Creighton, Robin Yang, Jin U. Kang, Axel Krieger | 날짜: 2024 | DOI: arXiv:2410.07493
Essence
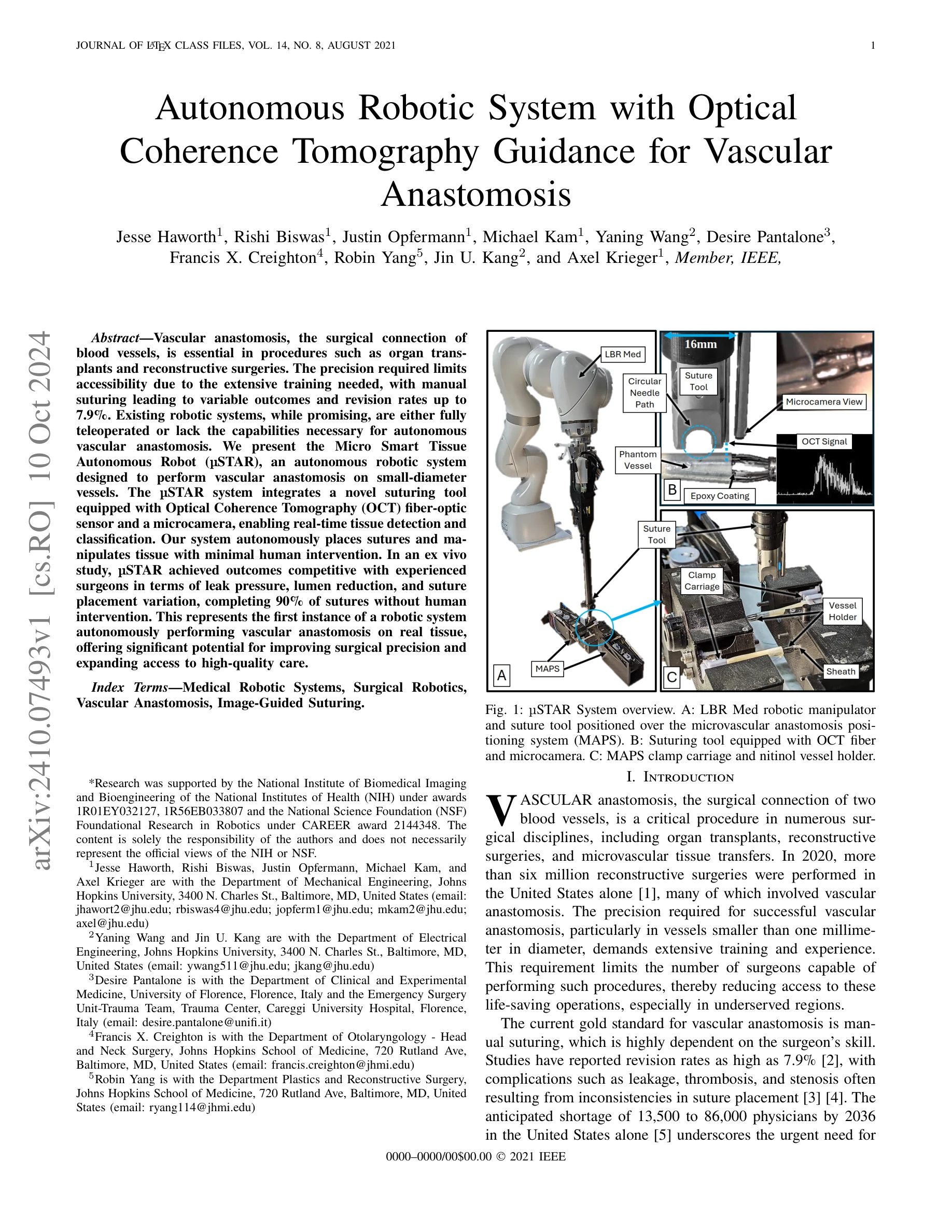
그림 1: µSTAR 시스템 개요 - LBR Med 로봇팔, 혈관 위치 결정 시스템(MAPS), OCT 광섬유 및 마이크로카메라 장착 봉합 도구
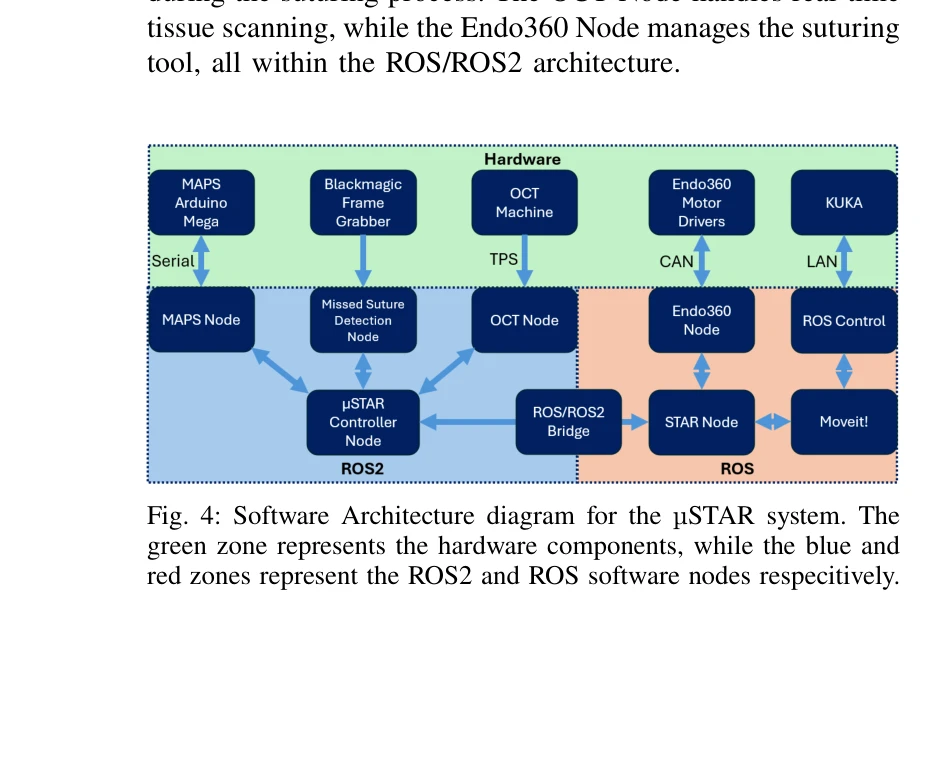
본 논문은 혈관 문합(vascular anastomosis)을 자율적으로 수행하는 최초의 로봇 시스템인 마이크로 스마트 조직 자율 로봇(µSTAR)을 개발했으며, OCT 기반 실시간 조직 감지와 신경망 기반 봉합 오류 감지를 통해 경험 많은 외과의들과 경쟁 가능한 수준의 성능을 ex vivo 조직에서 달성했다.
Evaluation
Novelty: 5/5 Technical Soundness: 4/5 Significance: 4.5/5 Clarity: 4/5 Overall: 4.4/5
총평: 본 논문은 혈관 문합이라는 고도의 정밀성을 요구하는 수술 영역에서 최초로 자율 로봇 시스템을 성공적으로 구현한 획기적 업적이다. OCT 기반 실시간 센싱과 신경망 기반 오류 감지라는 기술적 혁신이 돋보이며, ex vivo 실험에서 숙련 외과의와 동등한 성능을 입증했다는 점은 높이 평가할 만하다. 다만, 임상 적용을 위해서는 체계적인 in vivo 동물 실험, 통계적으로 충분한 표본 규모, 알고리즘의 투명성 향상이 필수적이다.