Achievement
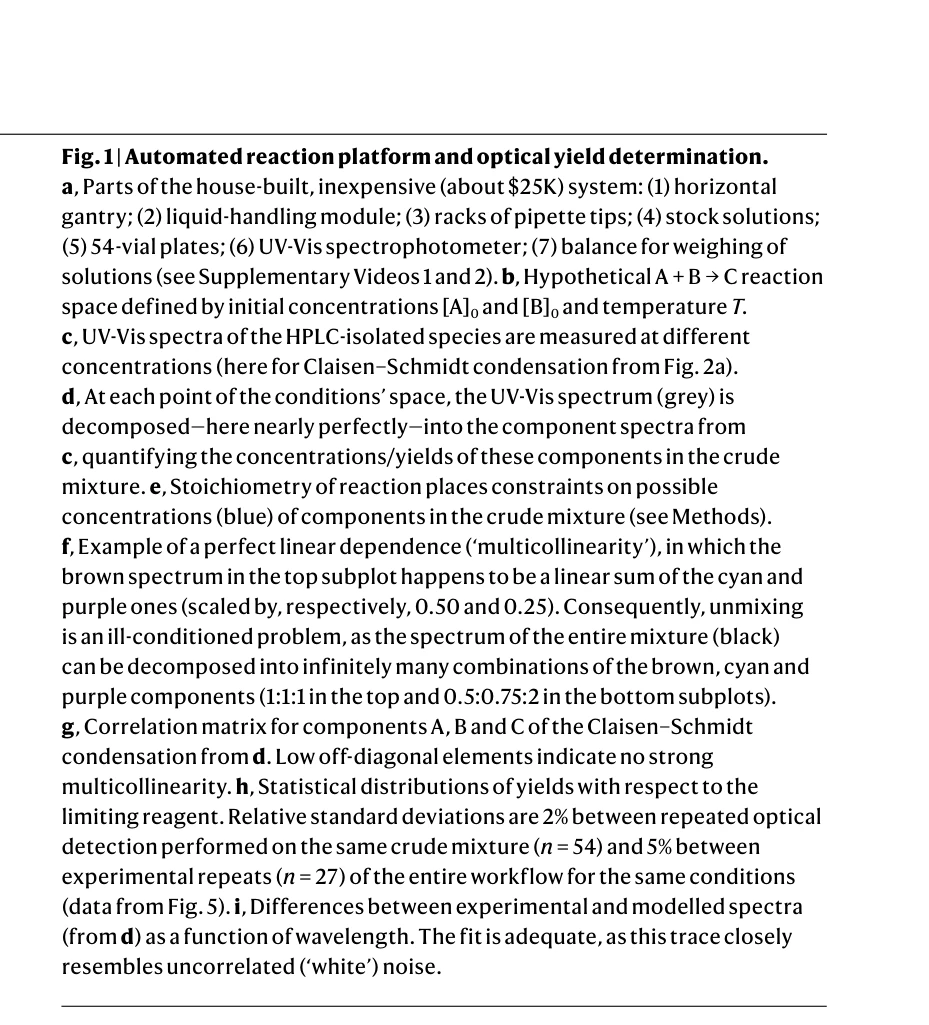
그림 1: (a) 약 $25K의 저비용 로봇 시스템 주요 구성. (b) N차원 초공간에서 조건을 설정하고 UV-Vis 스펙트럼 획득. 모든 초공간 지점의 조정된 혼합물을 결합. (c) HPLC로 정제한 순수 생성물의 농도-흡수 보정곡선. (d) 각 초공간 지점의 UV-Vis 스펙트럼을 기준 스펙트럼의 선형 조합으로 분해. (e-i) 화학량론 제약 조건, 다중공선성 진단, 적합성 검증을 위한 잔차 분석.
- 저비용 고처리량 플랫폼: 약 $25K 로봇으로 하루 1,000개 반응 실행 가능. UV-Vis 검출 (~100 샘플/시간, 샘플당 수 센트)로 NMR/LC-MS의 비용·시간 병목 회피. 전체 9,000개 이상의 조정된 혼합물 분석
- 스펙트럼 언믹싱 기반 정량화: 모든 초공간 샘플을 하나로 합치고 한 번의 HPLC/NMR/MS로 '기저 성분 집합(basis set)' 확인 후, 각 초공간 지점의 복잡한 UV-Vis 스펙트럼을 벡터 분해로 분해. 상대 표준 편차 5% 내 정확도 달성
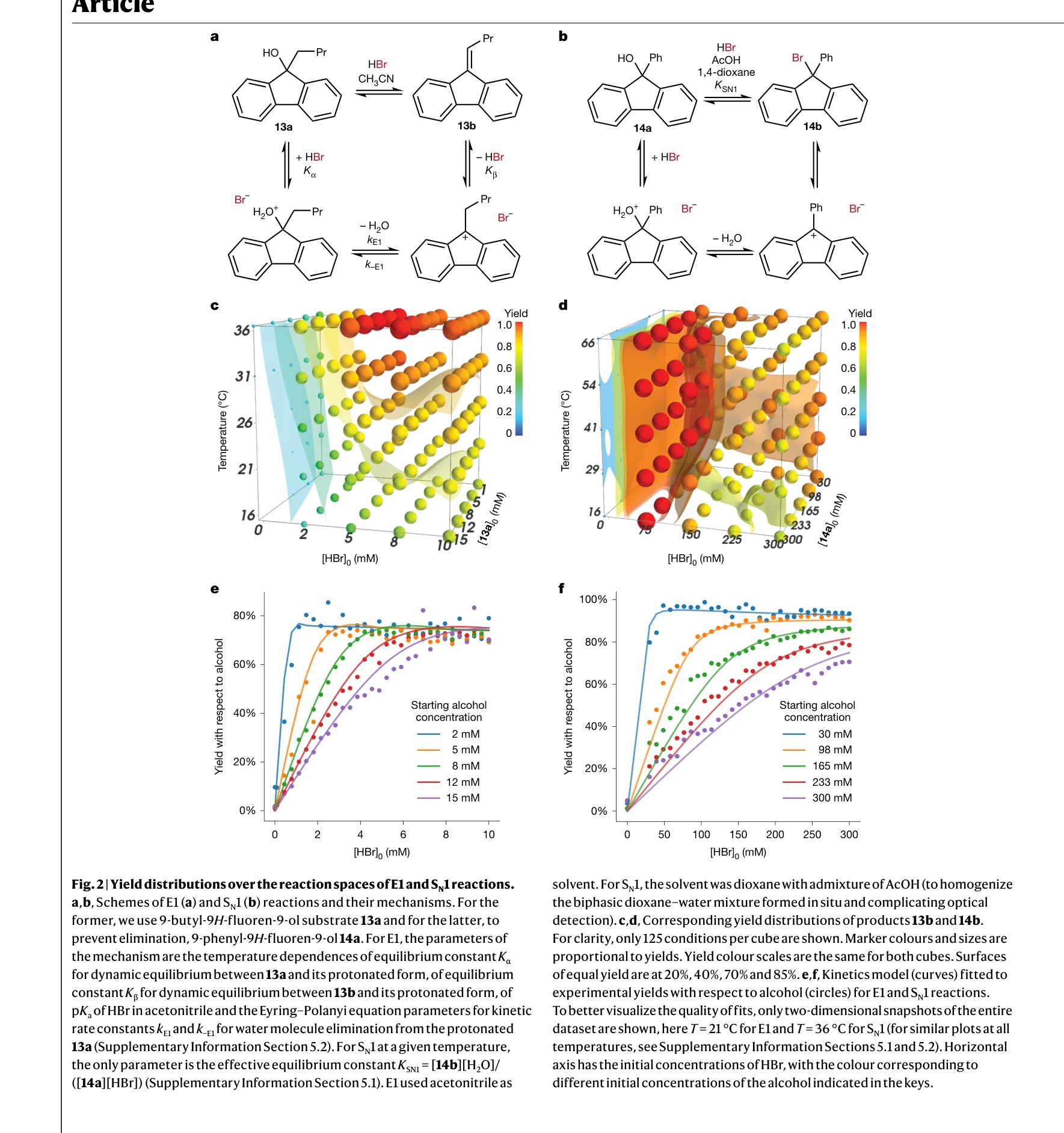
- 반응 초공간의 수학적 특성 규명: 연속 변수(농도, 온도)에 대해 개별 수율 분포는 일반적으로 천천히 변함(slow-varying). 동시에 예상 외 반응성 영역과 주생성물 전환점 발견
- 숨겨진 중간체·생성물 노출: 반응 기질 비율을 체계적으로 변화시킴으로써 반응 네트워크 재구성. 1세기 이상 연구된 반응에서도 미알려진 중간체·생성물 발견