저자: Yuqiang Li, Ruifeng Li, Dongzhan Zhou, Ancheng Shen, Ao Zhang, Mao Su, Mingqian Li, Hongyang Chen, Gang Chen, Yin Zhang, Shufei Zhang, Wanli Ouyang | 날짜: 2024 | DOI: [미제공]
Essence
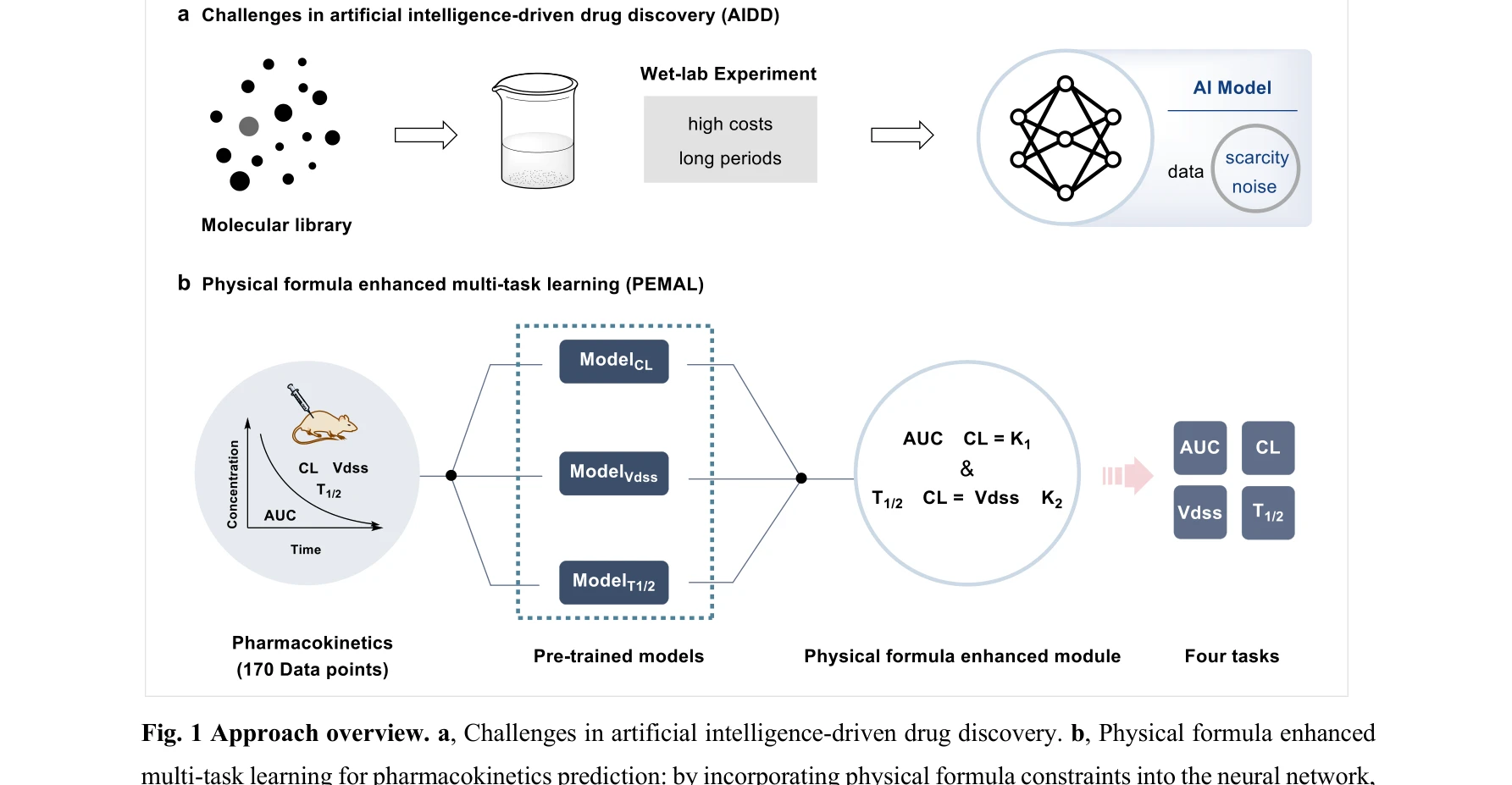
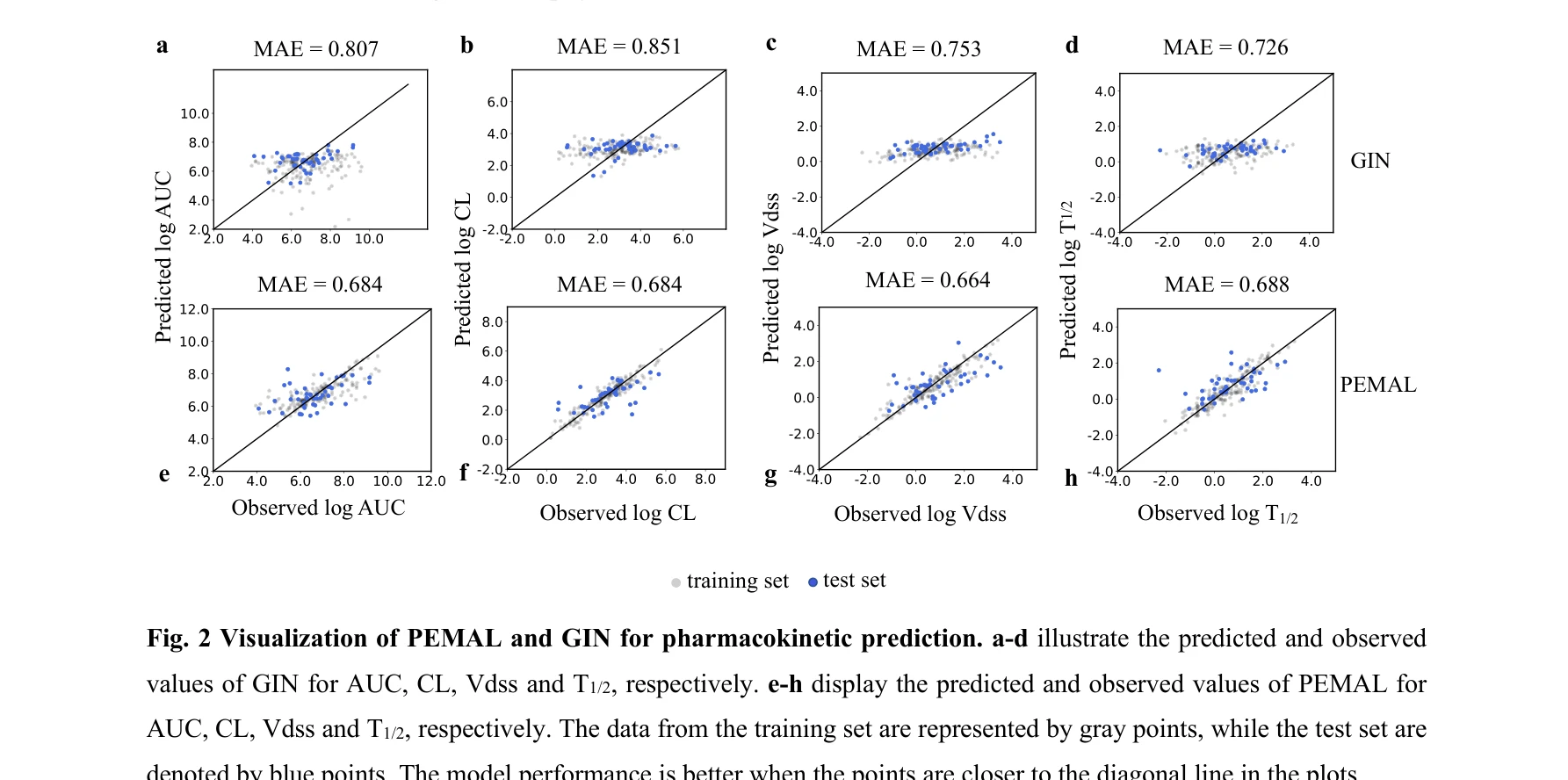
약동학 예측을 위한 물리 공식 강화 다중 작업 학습의 개요. (a) AI 기반 신약 개발의 과제, (b) 물리 공식 제약을 신경망에 통합하여 작업 간 지식 전이와 목표 정렬 강화
본 논문은 물리 공식(physical formula) 제약을 다중 작업 학습(multi-task learning)에 통합하여 약동학(pharmacokinetics)의 4가지 핵심 파라미터(AUC, CL, Vdss, T1/2)를 동시에 예측하는 PEMAL 프레임워크를 제시한다. 제한된 데이터와 높은 노이즈 환경에서 물리 제약을 활용한 명시적 작업 간 연결을 통해 예측 정확도와 견고성을 현저히 향상시킨다.
How
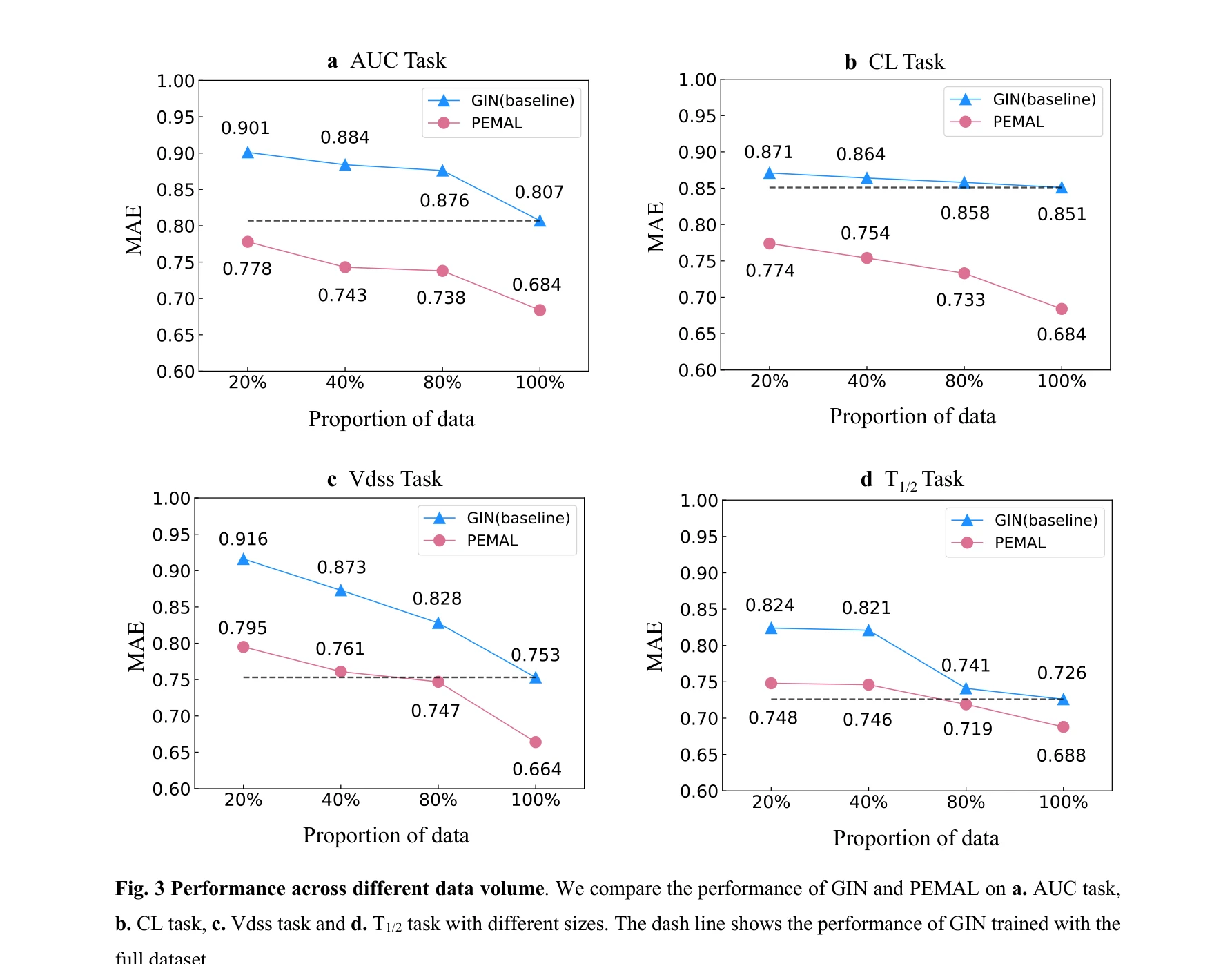
다양한 데이터 볼륨에 따른 성능 비교. PEMAL과 GIN의 각 약동학 파라미터별 성능 변화
Stage I - 자율 지도학습 (Dual-level Reconstruction):
- 원자(atom) 분기: 무작위 마스킹된 원자에 대해 재구성 작업 수행. MAE 손실로 감독
- 모티프(motif) 분기: 기능 그룹 수준의 정보 포착. 모티프 특징 마스킹 및 재구성
- 교차 수준 대조학습(cross-level contrastive learning): 동일 분자 내 원자-모티프 거리 최소화, 서로 다른 분자 간 거리 최대화로 상호작용 강화
Stage II - 약동학 데이터 사전학습:
- Stage I에서 학습된 그래프 인코더 로드
- CL, Vdss, T1/2에 대해 각각 완전 연결층(fully connected layer) 추가
- 로그 변환된 예측값과 관측값 간 MAE 손실로 감독
- AUC는 데이터 부족으로 이 단계에서 제외 (Stage III에서 물리 공식으로 유도)
Stage III - 물리 공식 강화 다중 작업 학습:
- 3개 병렬 분기: CL, Vdss, T1/2 각각 예측 (Stage II 가중치 상속)
- 물리 공식 제약 적용:
- 식(1): AUC × CL = K₁ (K₁ 상수) → AUC 유추
- 식(2): CL × T₁/₂ = Vdss × K₂ (K₂ 상수) → 명시적 작업 간 제약
- 감독 신호: 4개 파라미터의 MAE 손실(L_AUC, L_CL, L_Vdss, L_T₁/₂) + 식(2)의 물리 공식 제약
Evaluation
총평: 본 논문은 물리 제약을 신경망에 명시적으로 통합하여 희소하고 노이즈가 많은 약동학 데이터에서 우수한 성능을 달성한 기술적 기여도 높은 연구이다. 특히 이중 수준 분자 표현과 2단계 사전학습 전략은 혁신적이며, 약동학의 물리 관계식 활용은 도메인 지식의 효과적 인코딩을 보여준다. 다만 상수 결정, 손실함수 설계, 일반화 가능성 관련 설명이 보완되면 더욱 견고한 연구가 될 것으로 판단된다.