저자: Xiang Zhuang, Chenyi Zhou, Kehua Feng, Zhihui Zhu, Yunfan Gao, Yijie Zhong, Yichi Zhang, Junjie Huang, Keyan Ding, Lei Bai, Haofen Wang, Qiang Zhang, Huajun Chen | 날짜: 2026-03-20 | DOI: 미제공
Essence
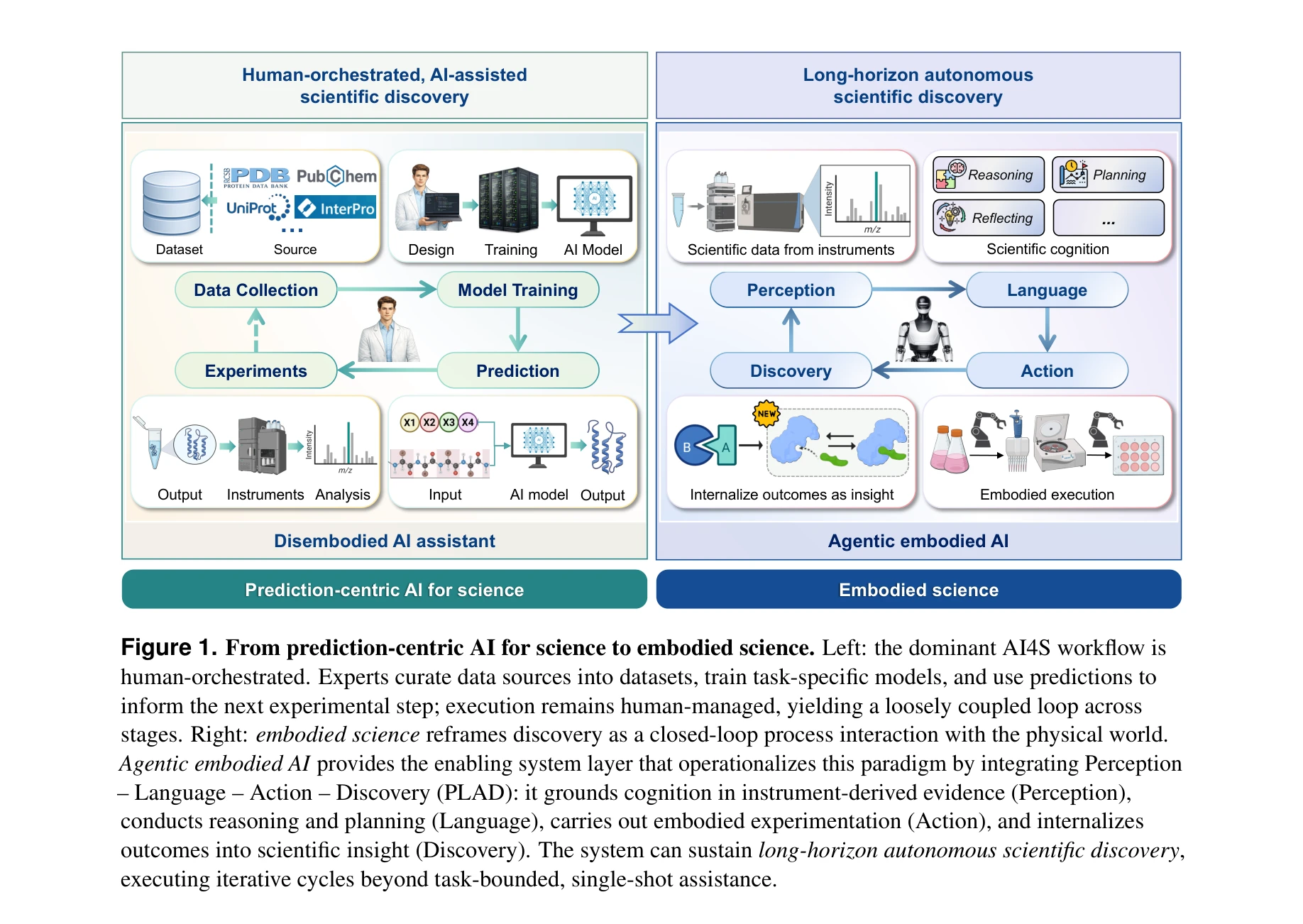
Figure 1: 예측 중심 AI4S에서 embodied science으로의 전환. 좌측은 기존의 인간-오케스트레이션 워크플로우, 우측은 폐쇄 루프의 PLAD 프레임워크를 보여줌
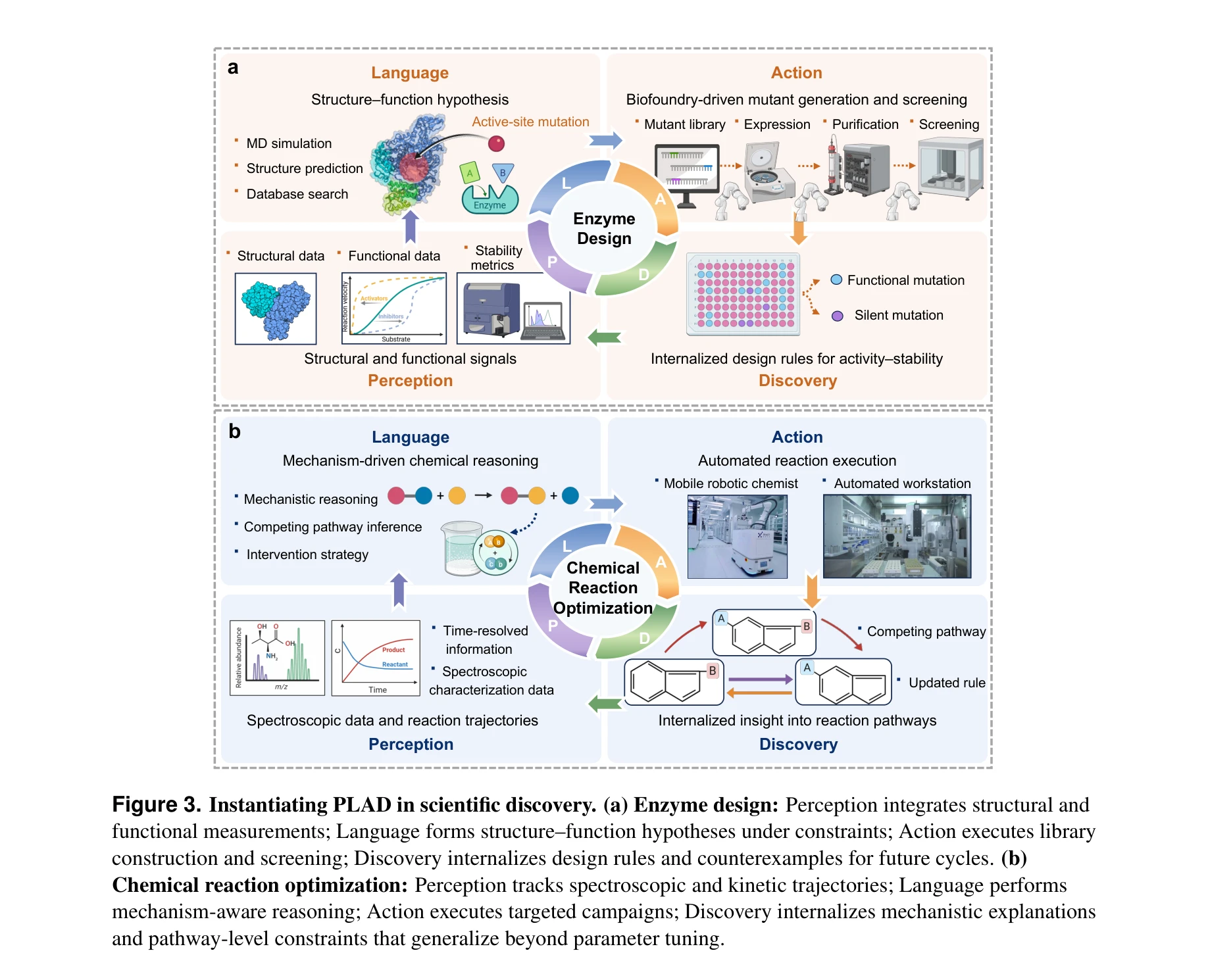
본 논문은 과학 발견을 고립된 예측 작업이 아닌 물리 세계와의 지속적 상호작용을 통한 폐쇄 루프 프로세스로 재정의하는 Embodied Science 패러다임을 제시한다. 이를 구현하기 위해 지각(Perception)–언어(Language)–행동(Action)–발견(Discovery)을 통합하는 PLAD 프레임워크 기반의 에이전틱 구현화 AI 시스템을 제안한다.
Evaluation
Novelty: 4.5/5 Technical Soundness: 3.5/5 Significance: 4.5/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 AI 기반 과학 발견의 패러다임 전환을 제시하는 중요한 관점의 논문으로, "Embodied Science"라는 명확한 개념 프레임워크와 PLAD 통합 아키텍처를 통해 기존 분산된 AI4S 접근법의 구조적 한계를 날카롭게 지적한다. 특히 폐쇄 루프 자율 발견의 운영 기준을 정의한 점은 향후 과학 AI 연구의 벤치마크로 기여할 것으로 판단된다. 다만, 제시된 부분의 범위 내에서는 구체적인 알고리즘, 실제 구현 사례, 기술적 도전과제의 해결 방안이 충분히 상세하게 다루어지지 않아, 완전한 기술적 타당성 검증을 위해서는 후속 섹션과 실험 결과에 대한 검토가 필수적이다.